PCL学习笔记二:Registration (ICP算法) |
您所在的位置:网站首页 › registration 翻译中文 › PCL学习笔记二:Registration (ICP算法) |
PCL学习笔记二:Registration (ICP算法)
|
ICP in PCL Registration
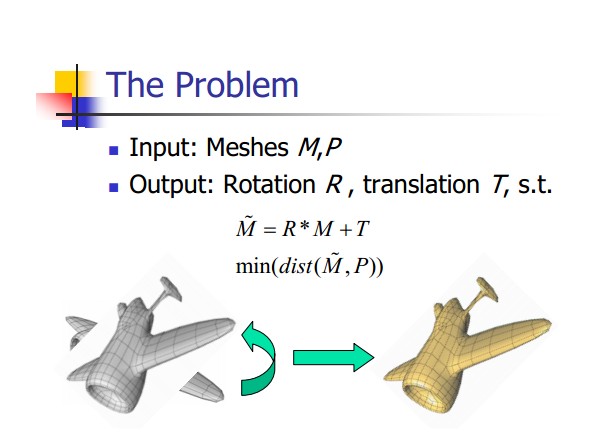
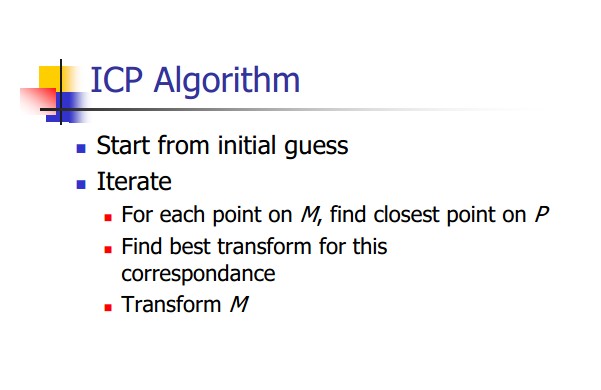
点云配准是什么,维基百科上这样介绍: Point cloud registration, is the process of finding a spatial transformation that aligns two point clouds. The purpose is to merge point clouds of multiple views into a globally consistent model. 在我的理解,有两个点集,source和target,target不变,source经过旋转(Rotation)和平移(Translation)甚至加上尺度(Scale)变换,使得变换后的source点集尽量和target点集重合,这个变换的过程就叫点集配准。 In the algorithm, target point cloud, is kept fixed, while the other one, the source, is transformed to best match the reference. The algorithm iteratively revises the transformation (combination of translation and rotation) needed to minimize the distance from the source to the reference point cloud. 而ICP是最广泛应用的配准方法,也就是KinectFusion论文中所提到的ICP( Iterative Closest Point ), 最近邻迭代算法。icp利用迭代一步步地算出正确对应关系。 Iterative Closest Point (ICP) is an algorithm employed to minimize the difference between two clouds of points.
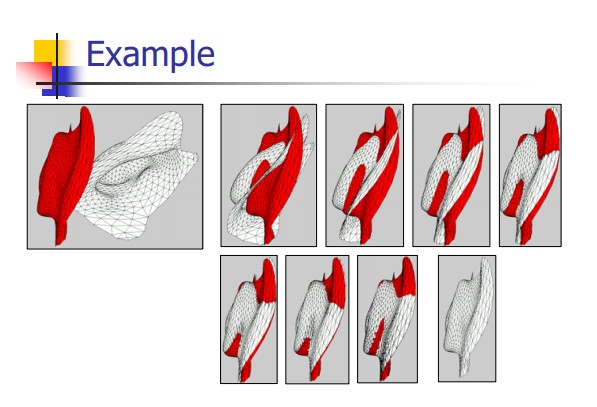
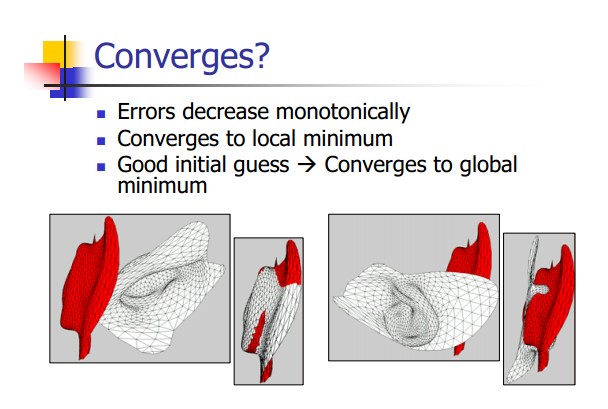
下面几页PPT是ICP很好的解释。
|
【本文地址】
今日新闻 |
推荐新闻 |